
Exercise 2.5.11. Given the incidence matrix from exercise 2.5.10 with the final column removed and a diagonal matrix 
Show that eliminating 


Answer: Removing the final column from the matrix in exercise 2.5.10 gives us the new matrix
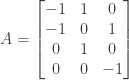
The diagonal matrix

has as its inverse
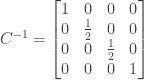
(Recall from Note 4 of section 1.6, “Inverses and Transposes”, that the inverse of a diagonal matrix 

We can thus express the system 


We can express the system 


This corresponds to the following system of equations:

Going back to the original two equations
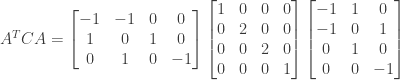
we can eliminate 


We have

If

or as the system of equations

We begin elimination by multiplying the first equation by -1/3 and subtracting it from the second equation, and multiplying the first equation by -2/3 and subtracting it from the third equation. The result is the following system:

We then multiply the second equation by -1/4 and subtract it from the third equation:

Solving for 








The solution to the system 
What are the currents along the edges? To determine that we must solve for 

We can check this answer using the equation

So 
NOTE: This continues a series of posts containing worked out exercises from the (out of print) book Linear Algebra and Its Applications, Third Edition by Gilbert Strang.
If you find these posts useful I encourage you to also check out the more current Linear Algebra and Its Applications, Fourth Edition, Dr Strang’s introductory textbook Introduction to Linear Algebra, Fourth Edition
and the accompanying free online course, and Dr Strang’s other books
.

