
Review exercise 2.32. a) Find the subspace of 


b) Find a matrix for which this subspace is the nullspace.
c) Find a matrix for which this subspace is the column space.
Answer: a) We have three equations that must be satisfied for any vector

These equations are equivalent to the following linear system

which in turn is equivalent to the matrix equation
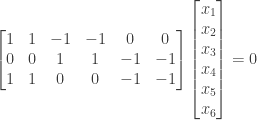
To solve the system we use Gaussian elimination. We first multiply row 1 by 1 and subtract the result from row 3:

Then we multiply row 2 by 1 and subtract the result from row 3:

The resulting echelon matrix has pivots in columns 1 and 3, so 





We first set 






We next set 






We next set 






Finally we set 




Any linear combination of the four solution vectors is also a solution to the original system, and is thus in the subspace also. The four solution vectors together constitute a basis for the subspace:

b) In solving the matrix equation
the solutions we found are in the nullspace of the matrix

Since the solutions formed a basis for the subspace, any vector in the subspace is in the nullspace of the matrix. Similarly any vector in the nullspace is in the subspace as well.
(Either a vector in the nullspace is a linear combination of the four basis vectors above or it is not. In the former case the vector is in the subspace. In the latter case the vector is linearly independent of the four basis vectors. But this is impossible since the matrix has two pivots and thus rank 

Since every vector in the subspace is in the nullspace of 
Note that the subspace is also the nullspace of the echelon matrix

This is the same as the echelon matrix found via Gaussian elimination, with the last row of zeros removed.
c) We can construct a matrix 

NOTE: This continues a series of posts containing worked out exercises from the (out of print) book Linear Algebra and Its Applications, Third Edition by Gilbert Strang.
If you find these posts useful I encourage you to also check out the more current Linear Algebra and Its Applications, Fourth Edition, Dr Strang’s introductory textbook Introduction to Linear Algebra, Fourth Edition
and the accompanying free online course, and Dr Strang’s other books
.


Hi, I think this question is asking me whether these vectors are subspaces of R^3 right? if so, i think a to e are all subspace.
Which of the following subsets of R3 are actually subspaces?
(a) The plane of vectors (b1, b2, b3) with first component b1=0.
(b) The plane of vectors b with b1=1.
(c) The vectors b with b2*b3=0
(d) All combinations of two given voctors (1, 1, 0) and (2, 0, 1).
(e) The plane of vectors (b1, b2, b3) that satisfy b1-b2+3b3=0
Apologies for the delay in responding. First, you can send questions like this to me via email. Second, recall that a subspace has to be a vector space, which means that 1) the sum of two vectors in the space is also a vector in the space, and 2) a scalar value times any vector in the space is also a vector in the space. As a consequence of part (2), all subspaces have to contain the zero vector, and a consequence of parts (1) and (2) taken together, if v1 and v2 are vectors in the space and c1 and c2 are scalar values, then any vector of the form c1v1 + c2v2 (a linear combination of v1 and v2) also has to be in the space.
So, given the above, here are some hints for answering these questions: (a) If you take two vectors of the form (0, b2, b3) and add them, is the result also in the plane? What if you multiply by any number, including zero?
(b) Similar tests as (a). In particular, is the zero vector (0, 0, 0) in the plane?
(c) Suppose we have vector b = (b1, b2, b3) with b2*b3 = 0 and vector d = (d1, d2, d3) with d2*d3 = 0. Consider the sum b+d = (b1+d1, b2+d2, b3+d3). Is this vector in the same set as the others? In other words, do we have (b2+d2)*(b3+d3) = 0?
(d) By combinations we mean “linear combinations”, in other words all vectors of the form c1*(1, 1, 0) + c2*(2, 0, 1). If you add two vectors of this form, is the result also a linear combination of (1, 1, 0) and (2, 0, 1)?
(e) Similar problem to (c): You take a vector b = (b1, b2, b3) with b1 – b2 + 3b3 = 0 and a vector d = (d1, d2, d3) with d1 – d2 + 3d3 = 0, and then test if the sum b+d satisfies the same condition.