
Exercise 3.3.18. Suppose we have the following measurements of 




and want to fit a plane of the form 
a) Write a system of 4 equations in 3 unknowns representing the problem. (The system may not have a solution.)
b) Write a system of 3 equations in 3 unknowns representing the least squares solution to the problem.
Answer: a) The original problem can be expressed as the following system 

From the fourth equation we have 



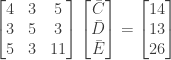
b) The least square solutions amounts to solving the system 



and

so that the resulting system of 3 equations in 3 unknowns
NOTE: This continues a series of posts containing worked out exercises from the (out of print) book Linear Algebra and Its Applications, Third Edition by Gilbert Strang.
If you find these posts useful I encourage you to also check out the more current Linear Algebra and Its Applications, Fourth Edition, Dr Strang’s introductory textbook Introduction to Linear Algebra, Fifth Edition
and the accompanying free online course, and Dr Strang’s other books
.

