
Exercise 3.3.21. Given three vectors 













Answer: We approach the problem by taking partial derivatives of 

We take advantage of the facts that for two vectors 







Next we take the partial derivatives with respect to



and with respect to



Equating the partial derivatives to zero gives us the following system of equations (after simplifying by dividing by 2 and rearranging terms):

When 





We can solve this by multiplying both sides of the equation on the left by

to get
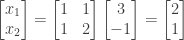
The solution is thus 
NOTE: This continues a series of posts containing worked out exercises from the (out of print) book Linear Algebra and Its Applications, Third Edition by Gilbert Strang.
If you find these posts useful I encourage you to also check out the more current Linear Algebra and Its Applications, Fourth Edition, Dr Strang’s introductory textbook Introduction to Linear Algebra, Fifth Edition
and the accompanying free online course, and Dr Strang’s other books
.

