Exercise 3.1.7. For the matrix
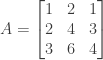
find vectors  and
and  such that is orthogonal to the row space of
such that is orthogonal to the row space of  and is orthogonal to the column space of >
and is orthogonal to the column space of >
Answer: The nullspace of is orthogonal to the row space of . We can therefore find a suitable vector by solving the system  .
.
To solve the system we perform Gaussian elimination. We start by subtracting 2 times row 1 from row 2:

and then subtract 3 times row 1 from row 3:

Finally we subtract row 2 from row 3:
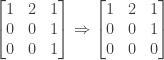
The echelon matrix has 2 pivots in columns 1 and 3, so  and
and  are basic variables and
are basic variables and  is a free variable.
is a free variable.
Setting  from row 2 we have
from row 2 we have  and from row 1 we have
and from row 1 we have  or
or  . So the vector
. So the vector  is a solution to the system, a basis for the nullspace of , and a vector orthogonal to the row space of .
is a solution to the system, a basis for the nullspace of , and a vector orthogonal to the row space of .
The left nullspace of is orthogonal to the column space of . We can therefore find a suitable vector by solving the system  .
.
To solve the system we perform Gaussian elimination. We start by subtracting 2 times row 1 from row 2:

and then subtract 1 times row 1 from row 3:
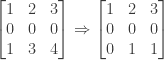
Finally we exchange rows 2 and row 3:

The resulting echelon matrix has 2 pivots in columns 1 and 2, so  and
and  are basic variables and
are basic variables and  is a free variable.
is a free variable.
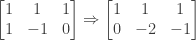
Setting  from row 2 we have
from row 2 we have  or
or  . From row 1 we have
. From row 1 we have  or
or  . So the vector
. So the vector  is a solution to the system, a basis for the left nullspace of , and a vector orthogonal to the column space of .
is a solution to the system, a basis for the left nullspace of , and a vector orthogonal to the column space of .
NOTE: This continues a series of posts containing worked out exercises from the (out of print) book Linear Algebra and Its Applications, Third Edition by Gilbert Strang.
by Gilbert Strang.
If you find these posts useful I encourage you to also check out the more current Linear Algebra and Its Applications, Fourth Edition , Dr Strang’s introductory textbook Introduction to Linear Algebra, Fourth Edition
, Dr Strang’s introductory textbook Introduction to Linear Algebra, Fourth Edition and the accompanying free online course, and Dr Strang’s other books
and the accompanying free online course, and Dr Strang’s other books .
.
 Buy me a snack to sponsor more posts like this!
Buy me a snack to sponsor more posts like this!











 and
and  find a homogeneous system in three unknowns whose solutions are the linear combinations of the vectors.
find a homogeneous system in three unknowns whose solutions are the linear combinations of the vectors. . This means that for any vector
. This means that for any vector 
 for all vectors
for all vectors  .)
.) spanned by the vectors
spanned by the vectors 

 , from the second row we have
, from the second row we have  or
or  . From the first row we have
. From the first row we have  or
or  .
. and
and  are orthogonal subspaces. Show that their intersection consists only of the zero vector.
are orthogonal subspaces. Show that their intersection consists only of the zero vector. for any vectors
for any vectors  in
in  in
in  . But this means that
. But this means that  and thus that
and thus that  .
. .
. and
and  in
in  is a vector orthogonal to both
is a vector orthogonal to both 
 or
or  . From row 1 we have
. From row 1 we have  or
or  . So the vector
. So the vector  is a solution to the system and thus a vector orthogonal to
is a solution to the system and thus a vector orthogonal to  , the length of
, the length of  , and the length of
, and the length of 








 and
and  are orthogonal to
are orthogonal to  but not to each other.
but not to each other. is an invertible matrix, describe why row
is an invertible matrix, describe why row  of
of  of
of  are orthogonal in the case
are orthogonal in the case  .
. . The identity matrix
. The identity matrix  has ones on the diagonal (i.e., when
has ones on the diagonal (i.e., when  ) and zeros otherwise (when
) and zeros otherwise (when  entry of the matrix product
entry of the matrix product  is equal to the inner product of row
is equal to the inner product of row  and
and  being orthogonal.
being orthogonal. and the line through the origin and
and the line through the origin and  . If the two lines are perpendicular we have
. If the two lines are perpendicular we have
 we have
we have

 give an example of linearly independent vectors that are not mutually orthogonal, as well as mutually orthogonal vectors that are not linearly independent.
give an example of linearly independent vectors that are not mutually orthogonal, as well as mutually orthogonal vectors that are not linearly independent. and
and  are linearly independent, since the second vector cannot be expressed as a scalar times the first vector. However the two vectors are not orthogonal since their inner product is
are linearly independent, since the second vector cannot be expressed as a scalar times the first vector. However the two vectors are not orthogonal since their inner product is  .
. is orthogonal to every vector in
is orthogonal to every vector in 
