Exercise 3.3.11. Suppose that  is a subspace with orthogonal complement
is a subspace with orthogonal complement  , with
, with  a projection matrix onto and
a projection matrix onto and  a projection matrix onto . What are
a projection matrix onto . What are  and
and  ? Also, show that
? Also, show that  is its own inverse.
is its own inverse.
Answer: Given any vector  we have
we have  where
where  is the projection of onto and
is the projection of onto and  is the projection of onto . Since and
is the projection of onto . Since and  are orthogonal complements the sum of the projections and is equal to itself. So we have
are orthogonal complements the sum of the projections and is equal to itself. So we have  and since this is true for all we have
and since this is true for all we have  .
.
This can be more formally proved as follows: Consider the matrix  . It is a projection matrix and it projects onto . Also, if is a projection matrix onto then it is unique. Since is a projection matrix onto and is a projection matrix onto we therefore have
. It is a projection matrix and it projects onto . Also, if is a projection matrix onto then it is unique. Since is a projection matrix onto and is a projection matrix onto we therefore have  or . For the full proof see below.
or . For the full proof see below.
Since  we have
we have
 .
.
(Applying to a vector first projects onto and then projects the resulting vector onto . But projecting any vector in onto will produce the zero vector, since and are orthogonal.)
Finally, we have
![(P-Q)(P-Q) = [(I-Q) - Q][(I-Q) - Q]](https://s0.wp.com/latex.php?latex=%28P-Q%29%28P-Q%29+%3D+%5B%28I-Q%29+-+Q%5D%5B%28I-Q%29+-+Q%5D&bg=ffffff&fg=333333&s=0&c=20201002)


Since  we have
we have  so that is its own inverse.
so that is its own inverse.
Here is the full proof that if a projection matrix onto and a projection matrix onto then :
We first show that is a projection matrix. The identity matrix  is symmetric, and since is a projection matrix it is also symmetric. The difference is therefore symmetric as well, so that we have
is symmetric, and since is a projection matrix it is also symmetric. The difference is therefore symmetric as well, so that we have  .
.
We also have


Since and  we see that is a projection matrix.
we see that is a projection matrix.
Onto what subspace does project? For any vector we have  . Since is a projection matrix the vector is in the space onto which projects, and the vector
. Since is a projection matrix the vector is in the space onto which projects, and the vector  is orthogonal to that space. But projects onto so
is orthogonal to that space. But projects onto so  must therefore be in
must therefore be in  .
.
We have thus shown that is a projection matrix that projects onto . We now show that any such projection matrix is unique.
Suppose that like the matrix  is also a projection matrix onto . Consider the vector
is also a projection matrix onto . Consider the vector  for any vector . We have
for any vector . We have
![\|(P - P')v\|^2 = [(P-P')v]^T[(P-P')v]](https://s0.wp.com/latex.php?latex=%5C%7C%28P+-+P%27%29v%5C%7C%5E2+%3D+%5B%28P-P%27%29v%5D%5ET%5B%28P-P%27%29v%5D&bg=ffffff&fg=333333&s=0&c=20201002)

where we take advantage of the fact that  .
.
But since and are projection matrices they are symmetric, and therefore their difference  is also symmetric. We thus have
is also symmetric. We thus have

![= v^T[P^2 - PP' - P'P + (P')^2]v](https://s0.wp.com/latex.php?latex=%3D+v%5ET%5BP%5E2+-+PP%27+-+P%27P+%2B+%28P%27%29%5E2%5Dv&bg=ffffff&fg=333333&s=0&c=20201002)
But since and are projection matrices we have  and
and  . We thus have
. We thus have
![\|(P - P')v\|^2 = v^T[P - PP' - P'P + P']v](https://s0.wp.com/latex.php?latex=%5C%7C%28P+-+P%27%29v%5C%7C%5E2+%3D%C2%A0v%5ET%5BP+-+PP%27+-+P%27P+%2B+P%27%5Dv&bg=ffffff&fg=333333&s=0&c=20201002)
Since is a projection matrix onto we know that  for any vector
for any vector  in . (In other words, when applied to any vector in the projection matrix projects that vector onto itself.) The same is true for since it is also a projection matrix onto . We thus have
in . (In other words, when applied to any vector in the projection matrix projects that vector onto itself.) The same is true for since it is also a projection matrix onto . We thus have  for all in .
for all in .
Given any vector (not necessarily in ) we then have  since is a vector in . Since is a projection matrix we have
since is a vector in . Since is a projection matrix we have  and thus
and thus  , so that
, so that  for all vectors . This implies that
for all vectors . This implies that  .
.
Similarly for any vector we have  since
since  is a vector in . Since is a projection matrix we have
is a vector in . Since is a projection matrix we have  and thus
and thus  , so that
, so that  for all vectors . This implies that
for all vectors . This implies that  .
.
Since and we have


Since  we have
we have  , and since this is true for any vector we must have
, and since this is true for any vector we must have  or
or  . A projection matrix onto a subspace is therefore unique.
. A projection matrix onto a subspace is therefore unique.
Thus since is a projection matrix onto and is also a projection matrix onto we have or  .
.
NOTE: This continues a series of posts containing worked out exercises from the (out of print) book Linear Algebra and Its Applications, Third Edition by Gilbert Strang.
by Gilbert Strang.
If you find these posts useful I encourage you to also check out the more current Linear Algebra and Its Applications, Fourth Edition , Dr Strang’s introductory textbook Introduction to Linear Algebra, Fifth Edition
, Dr Strang’s introductory textbook Introduction to Linear Algebra, Fifth Edition and the accompanying free online course, and Dr Strang’s other books
and the accompanying free online course, and Dr Strang’s other books .
.

































 ,
,  , and
, and  ? What is the projection of
? What is the projection of 

 of
of 
 as discussed above.
as discussed above. .
. then what is the subspace onto which
then what is the subspace onto which  . We have
. We have
 we then have
we then have
 the matrix
the matrix  . So
. So  onto a subspace
onto a subspace  . What is the column space of
. What is the column space of  . Since any vector in
. Since any vector in  .
. . Consider the vector
. Consider the vector  . We then have
. We then have  by the definition of
by the definition of  for some
for some  .
. : The column space of
: The column space of  and
and  find the projection matrix
find the projection matrix 



 of two orthogonal vectors
of two orthogonal vectors  where
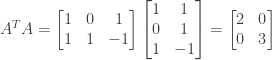
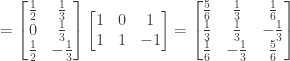
where  per equation (3) of 3L on page 156. We first compute
per equation (3) of 3L on page 156. We first compute




 we have
we have

 , the column space of A, and the orthogonal subspace of
, the column space of A, and the orthogonal subspace of  , the left nullspace of
, the left nullspace of  . We confirm this:
. We confirm this:




 , the least squares solution to
, the least squares solution to  that minimizes the error vector
that minimizes the error vector  .
. . In this case we have
. In this case we have





 with slope
with slope  and intercept
and intercept  .
.

 , compute its partial derivatives with respect to
, compute its partial derivatives with respect to  and
and  to confirm that you obtain the same normal equations in both cases (i.e., using calculus vs. geometry). Then find the projection
to confirm that you obtain the same normal equations in both cases (i.e., using calculus vs. geometry). Then find the projection  and explain why
and explain why  .
.


![= (u-1)^2 + (v-3)^2 + [(u+v)-4]^2](https://s0.wp.com/latex.php?latex=%3D+%28u-1%29%5E2+%2B+%28v-3%29%5E2+%2B+%5B%28u%2Bv%29-4%5D%5E2&bg=ffffff&fg=333333&s=0&c=20201002)
![= (u^2-2u+1) + (v^2-6v+9) +[ (u+v)^2 - 8(u+v) + 16]](https://s0.wp.com/latex.php?latex=%3D+%28u%5E2-2u%2B1%29+%2B+%28v%5E2-6v%2B9%29+%2B%5B+%28u%2Bv%29%5E2+-+8%28u%2Bv%29+%2B+16%5D&bg=ffffff&fg=333333&s=0&c=20201002)





 and
and  represent the least squares solution.
represent the least squares solution.







 . We have
. We have

 by
by 

 is orthogonal to every column in
is orthogonal to every column in