
Exercise 2.2.12. What is a 2 by 3 system of equations 

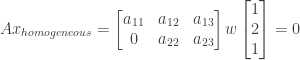
Answer: The general solution above is the sum of a particular solution and a homogeneous solution, where

and

Since 




To simplify solving the problem we can assume that

where 

We then have
If we assume that

or (expressed as a system of equations)

The pivot 




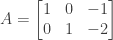
so that we have

as required.
We next turn to the general system 
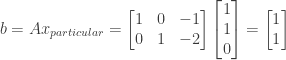
This gives us the following as an example 2 by 3 system that has the general solution specified above:

or
Finally, note that the solution provided for exercise 2.2.12 at the end of the book is incorrect. The right-hand side must be a 2 by 1 matrix and not a 3 by 1 matrix, so the final value of 0 in the right-hand side should not be present.
NOTE: This continues a series of posts containing worked out exercises from the (out of print) book Linear Algebra and Its Applications, Third Edition by Gilbert Strang.
If you find these posts useful I encourage you to also check out the more current Linear Algebra and Its Applications, Fourth Edition, Dr Strang’s introductory textbook Introduction to Linear Algebra, Fourth Edition
and the accompanying free online course, and Dr Strang’s other books
.


I think that your final note is incorrect, due to the fact that if you find the general solution for the system Ax=b that you found, you’ll have to write the solution like Strang does it in (3) page (76). There are three entries on the solution because “x” vector lenght. The general solution (in Matlab notation) is x = [u; v; w] = [1+w; 1+2w; w]= [1; 1; 0] + w*[1; 2; 1]. The general solution he proposed at the begining of the exercise
My apologies for the delay in responding. Are you referring to my final sentence about the solution to exercise 2.2.12 given on page 476 in the back of the book? If so, I think I may have confused you. I am *not* saying that Strang wrote the general solution incorrectly in the statement of the exercise on page 79, or that Strang found an incorrect solution to the exercise.
Rather my point is as follows: In the statement of the solution on page 476 Strang shows as a solution the same 2 by 3 matrix that I derived above, and Strang shows that 2 by 3 matrix multiplying the vector (u, v, w) just as I do above, representing a system of two equations in three unknowns. However on the right-hand side Strang shows that 2 by 3 matrix multiplying the vector (u, v, w) to produce the vector (1, 1, 0). This cannot be: since the matrix has only two rows, that multiplication would produce a vector with only two elements, not three (as in the book). Those two elements represent the right-hand sides of the corresponding system of two equations.
So the left-hand side in the solution of 2.2.12 on page 476 is correct, but the right-hand side of the solution of 2.2.12 on page 476, namely the vector (1, 1, 0), is not. Instead the right-hand side should be the vector (1, 1) as I derived above.