
Exercise 2.4.18. Given the vectors

and the subspace 



Answer: The easiest way to create a matrix whose row space is

However we can simplify things by doing Gaussian elimination on this matrix to obtain another matrix with the same row space
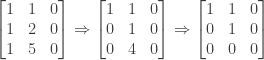
We can then further simplify by subtracting the second row from the first; again, this does not change the row space:
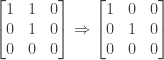
Our final matrix is thus

with 

We now want to find a second matrix 






for which

and

For any solution 


From the above we see that 




But this is equivalent to all linear combinations of the coordinate vectors 
NOTE: This continues a series of posts containing worked out exercises from the (out of print) book Linear Algebra and Its Applications, Third Edition by Gilbert Strang.
If you find these posts useful I encourage you to also check out the more current Linear Algebra and Its Applications, Fourth Edition, Dr Strang’s introductory textbook Introduction to Linear Algebra, Fourth Edition
and the accompanying free online course, and Dr Strang’s other books
.

