
Exercise 2.4.19. For the following matrix

find a basis for each of the four associated subspaces.
Answer: Per the above equation the matrix 


The matrix
are a basis for the row space 
The matrix 

are also linearly independent and form a basis for the column space 
The nullspace of

Since 






or 
Setting each of the free variables to 1 in turn and the others to zero, a solution for 


The vectors
are thus a basis for the nullspace 
Finally we consider the left nullspace of 


Since 





Instead to find a suitable
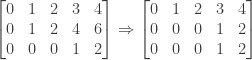
and then subtracting the second row of the resulting matrix from the third row:

The zero row in

is therefore a basis for the left nullspace
NOTE: This continues a series of posts containing worked out exercises from the (out of print) book Linear Algebra and Its Applications, Third Edition by Gilbert Strang.
If you find these posts useful I encourage you to also check out the more current Linear Algebra and Its Applications, Fourth Edition, Dr Strang’s introductory textbook Introduction to Linear Algebra, Fourth Edition
and the accompanying free online course, and Dr Strang’s other books
.

