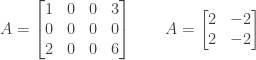
Exercise 2.5.1. Describe the incidence matrix 
The graph has three nodes and three edges, with edge 1 going from node 2 to node 1, edge 2 going from node 3 to node 2, and edge 3 going from node 3 to node 1.
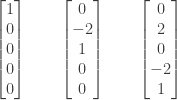
Find a solution to 



Answer: Since the graph has three edges the incidence matrix

The first row represents edge 1 from node 2 to node 1 (i.e., leaving node 2 and entering node 1). The second row represents edge 2 from node 3 to node 2. The third row represents edge 3 from node 3 to node 1.
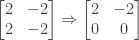
The sum of the first and second rows equals the third row, so the rank 


Since the entries in each row sum to zero, the vector 


Since 



UPDATE: Added a paragraph to clarify what the rows of
NOTE: This continues a series of posts containing worked out exercises from the (out of print) book Linear Algebra and Its Applications, Third Edition by Gilbert Strang.
If you find these posts useful I encourage you to also check out the more current Linear Algebra and Its Applications, Fourth Edition, Dr Strang’s introductory textbook Introduction to Linear Algebra, Fourth Edition
and the accompanying free online course, and Dr Strang’s other books
.
 the associated subspaces (column space, row space, null space, and left nullspace) are the same. Does this imply that
the associated subspaces (column space, row space, null space, and left nullspace) are the same. Does this imply that  ?
?
 . We also have the row spaces
. We also have the row spaces  . Since the matrices are nonsingular the nullspaces
. Since the matrices are nonsingular the nullspaces  contain only the zero vector and are thus equal. For the same reason the left nullspaces
contain only the zero vector and are thus equal. For the same reason the left nullspaces  also contain only the zero vector and are also equal.
also contain only the zero vector and are also equal. for some scalar
for some scalar 



 and the row space is all of
and the row space is all of  .
. is to use the vectors in question as the only columns in the matrix:
is to use the vectors in question as the only columns in the matrix:
 so that vector is in the row space
so that vector is in the row space  . Similarly adding the first row of
. Similarly adding the first row of  so that vector is also in the row space
so that vector is also in the row space  (since each vector in the nullspace must be a solution to
(since each vector in the nullspace must be a solution to  multiply the columns of
multiply the columns of  by
by  matrix the dimension of the nullspace is
matrix the dimension of the nullspace is  where
where  is the rank of the matrix. In this case the column space and nullspace each have only a single vector as a basis, so the dimension of the column space and nullspace are each 1. This implies that the rank
is the rank of the matrix. In this case the column space and nullspace each have only a single vector as a basis, so the dimension of the column space and nullspace are each 1. This implies that the rank  and the number of columns
and the number of columns  for a matrix with the specified property.
for a matrix with the specified property.
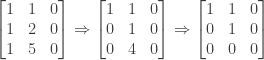
 with unit diagonal and an upper triangular matrix
with unit diagonal and an upper triangular matrix  .
.
 .
. . The corresponding second and fourth columns of
. The corresponding second and fourth columns of 

 and
and  are basic variables with the others being free variables. From the second row above we have
are basic variables with the others being free variables. From the second row above we have  or
or  . Substituting into the first row we have
. Substituting into the first row we have


 .
. and thus
and thus 
 .
. we have
we have  . The last row of
. The last row of  is a basis for the (1-dimensional) left nullspace
is a basis for the (1-dimensional) left nullspace  such that
such that  . However we do not need to compute
. However we do not need to compute 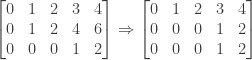



 that they span, find two matrices
that they span, find two matrices  .
.

 . Note that
. Note that  and
and  are a basis for
are a basis for  then for any vector
then for any vector  in
in  . In particular, we must have
. In particular, we must have  for the coordinate vectors
for the coordinate vectors  and
and  that form a basis for
that form a basis for 


 to
to  we must then have
we must then have
 and that
and that  and
and 
 .
. . Then we can multiply both sides by
. Then we can multiply both sides by  to produce
to produce  or
or  . But we then have
. But we then have  so that
so that  actually exists.
actually exists. , the number of columns.
, the number of columns. of
of  is a linear combination of the columns of
is a linear combination of the columns of  as coefficients. Since the columns of
as coefficients. Since the columns of  . The nullspace
. The nullspace  and since it has dimension
and since it has dimension 
 so that
so that  .
. . We must have
. We must have  or
or
 and
and  . One way to achieve this is to set
. One way to achieve this is to set  and
and  .
. and
and  . One way to achieve this is to set
. One way to achieve this is to set  and
and  . We then have
. We then have

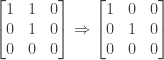
 . The first and third rows of
. The first and third rows of  .
. . We could proceed as we did above, but there is a shortcut: Note that
. We could proceed as we did above, but there is a shortcut: Note that  so that we are looking for
so that we are looking for  . But
. But  and we already have a matrix
and we already have a matrix  or
or  :
:

 . If
. If  then
then  both a left inverse
both a left inverse  .
.


 ,
,  , and
, and  does
does  ?
? (which is permissible since
(which is permissible since 
 or
or  .
.