Exercise 2.3.7. For each of the following, state whether the vector  is in the subspace spanned by
is in the subspace spanned by  . (Construct a matrix
. (Construct a matrix  with as the columns, and try to solve
with as the columns, and try to solve  .)
.)
a)  ,
,  ,
,  ,
, 
b)  ,
,  , ,
, ,  , any
, any
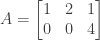
Answer: a) We construct the matrix

and do Gaussian elimination on the left and right hand sides of :

From the third equation we have the contradiction  and we conclude that has no solution in this case. The vector is therefore not in the subspace spanned by
and we conclude that has no solution in this case. The vector is therefore not in the subspace spanned by  ,
,  , and
, and  .
.
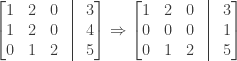
b) We construct the matrix

and do Gaussian elimination on the left and right hand sides of :

The pivots are in columns 1 through 3 and the basic variables are  ,
,  , and
, and  with
with  being a free variable. The first three columns of the original matrix are thus linearly independent; the fourth column is a linear combination of the others. Since the first three columns , , and are vectors in
being a free variable. The first three columns of the original matrix are thus linearly independent; the fourth column is a linear combination of the others. Since the first three columns , , and are vectors in  and are linearly independent, they span all of and thus any vector
and are linearly independent, they span all of and thus any vector  can be represented as a linear combination of , , and using suitable weights.
can be represented as a linear combination of , , and using suitable weights.
Going further, from the third equation we have  or
or  . From the second equation we have
. From the second equation we have  . From the first equation we have
. From the first equation we have


The equation is equivalent to


Dropping the zero vector  we can therefore represent any vector in
we can therefore represent any vector in  as a linear combination of , , and as follows:
as a linear combination of , , and as follows:

NOTE: This continues a series of posts containing worked out exercises from the (out of print) book Linear Algebra and Its Applications, Third Edition by Gilbert Strang.
by Gilbert Strang.
If you find these posts useful I encourage you to also check out the more current Linear Algebra and Its Applications, Fourth Edition , Dr Strang’s introductory textbook Introduction to Linear Algebra, Fourth Edition
, Dr Strang’s introductory textbook Introduction to Linear Algebra, Fourth Edition and the accompanying free online course, and Dr Strang’s other books
and the accompanying free online course, and Dr Strang’s other books .
.










 ?
?
 is in echelon form and has pivots in every column, the columns are linearly independent. Since
is in echelon form and has pivots in every column, the columns are linearly independent. Since  in
in 

 is in echelon form and has pivots in all columns the columns are linearly independent. They also span
is in echelon form and has pivots in all columns the columns are linearly independent. They also span  expressible as
expressible as
 with components that sum to zero
with components that sum to zero sum to zero then we have
sum to zero then we have

 contains solutions to
contains solutions to  or
or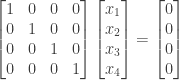

 or
or  . The nullspace consists only of the zero vector and (by convention) its dimension is zero.
. The nullspace consists only of the zero vector and (by convention) its dimension is zero.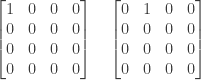

 ,
,  ,
,  , and
, and  , is a basis for
, is a basis for  is a subspace of
is a subspace of  ,
,  ,
,  , and
, and  and suppose that
and suppose that  . (It is fairly simple to verify that
. (It is fairly simple to verify that  and
and  as a basis for the subspace
as a basis for the subspace  in the subspace expressible as
in the subspace expressible as
 . One basis for the subspace consists of the vectors
. One basis for the subspace consists of the vectors  and
and  with any vector
with any vector  in the subspace expressible as
in the subspace expressible as
 and
and  with any vector
with any vector 
 in echelon form.
in echelon form.


 ,
,  may be zero. The subspace spanned is the set of all upper triangular matrices, and the three matrices
may be zero. The subspace spanned is the set of all upper triangular matrices, and the three matrices

 and is different than the column space of
and is different than the column space of 
 .
. where
where  is any real number; geometrically the column space is a line passing through the origin and the point
is any real number; geometrically the column space is a line passing through the origin and the point  . The vector
. The vector 
 so that the first column of
so that the first column of  ,
,  , and
, and 
 , and
, and 
 and
and  so that the space spanned by the set of vectors is simply the line passing through the origin and the point
so that the space spanned by the set of vectors is simply the line passing through the origin and the point  axis in
axis in  ) component to be zero they are in the
) component to be zero they are in the  plane. There is no nonzero
plane. There is no nonzero  so those two vectors are linearly independent; however the third vector can be expressed as a nontrivial linear combination of the first two:
so those two vectors are linearly independent; however the third vector can be expressed as a nontrivial linear combination of the first two:  . Together the first two vectors span the
. Together the first two vectors span the  ,
,  , and
, and  . Thus the space spanned by all six vectors is the same as that spanned by the vectors in (b), namely the
. Thus the space spanned by all six vectors is the same as that spanned by the vectors in (b), namely the  ,
, 
