Review exercise 1.27. State whether the following are true or false. If true explain why, and if false provide a counterexample.
(1) If a matrix  can be factored as
can be factored as  where
where  and
and  are lower triangular with unit diagonals and
are lower triangular with unit diagonals and  and
and  are upper triangular, then
are upper triangular, then  and
and  . (In other words, the factorization
. (In other words, the factorization  is unique.)
is unique.)
(2) If for a matrix we have  then is invertible and
then is invertible and  .
.
(3) If all the diagonal entries of a matrix are zero then is singular.
Answer: (1) True. Since and are lower triangular with unit diagonal both matrices are invertible, and their inverses are also lower triangular with unit diagonal. (See the proof of this below at the end of the post.) Similarly since and are upper triangular with nonzero diagonal those matrices are invertible as well, and their inverses are also upper triangular with nonzero diagonal.
We then start with the equation  and multiply both sides by
and multiply both sides by  on the left and by
on the left and by  on the right:
on the right:

This equation reduces to  where
where  is the product matrix. Now since is the product of two lower triangular matrices with unit diagonal (i.e., and ), it itself is a lower triangular matrix with unit diagonal. Since is the product of two upper triangular matrices (i.e., and ), it is also an upper triangular matrix. Since is both lower triangular and upper triangular it must be a diagonal matrix, and since its diagonal entries are all 1 we must have
is the product matrix. Now since is the product of two lower triangular matrices with unit diagonal (i.e., and ), it itself is a lower triangular matrix with unit diagonal. Since is the product of two upper triangular matrices (i.e., and ), it is also an upper triangular matrix. Since is both lower triangular and upper triangular it must be a diagonal matrix, and since its diagonal entries are all 1 we must have  .
.
Since  we can multiply both sides on the left by to obtain
we can multiply both sides on the left by to obtain  or . Similarly since
or . Similarly since  we can multiply both sides on the right by to obtain
we can multiply both sides on the right by to obtain  or
or  . So the factorization is unique.
. So the factorization is unique.
(2) True. Assume . We have  so that
so that  is a right inverse for . We also have
is a right inverse for . We also have  so that is a left inverse for . Since
so that is a left inverse for . Since  is both a left and right inverse of we know that is invertible and that .
is both a left and right inverse of we know that is invertible and that .
(3) False. The matrix

has zeros on the diagonal but is nonsingular. In fact we have

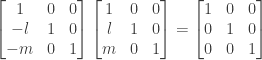
Proof of the result used in (1) above: Assume  is a lower triangular matrix with unit diagonal. That is invertible can be seen from Gauss-Jordan elimination (here shown in a 4 by 4 example, although the argument generalizes to all
is a lower triangular matrix with unit diagonal. That is invertible can be seen from Gauss-Jordan elimination (here shown in a 4 by 4 example, although the argument generalizes to all  ):
):

Note that in forward elimination each of the diagonal entries of will remain as is, since each of these entries has only zeros above it; each of the zero entries above the diagonal will remain unchanged as well, for the same reason. When forward elimination completes the left hand matrix will be the identity matrix since it will have zeros below the diagonal (from forward elimination), ones on the diagonal (as noted above), and zeroes above the diagonal (also as noted above). Gauss-Jordan elimination is thus guaranteed to complete successfully, so is invertible.
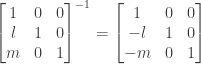
The right-hand matrix at the end of Gauss-Jordan elimination will be the inverse of . That matrix was produced from the identity matrix by forward elimination only, since backward elimination was not necessary. For the same reason noted above for the left-hand matrix, forward elimination will preserve the unit diagonal in the right-hand matrix and the zeros above it, with the only possible non-zero entries occurring below the unit diagonal. We thus see that if is a lower-triangular matrix with unit diagonal then it is invertible and its inverse  is also a lower-triangular matrix with unit diagonal.
is also a lower-triangular matrix with unit diagonal.
Assume  is an upper triangular matrix with nonzero diagonal. That is invertible can be seen from Gauss-Jordan elimination (again shown in a 4 by 4 example):
is an upper triangular matrix with nonzero diagonal. That is invertible can be seen from Gauss-Jordan elimination (again shown in a 4 by 4 example):

Note that forward elimination is not necessary: There are nonzero entries on the diagonal and zeros below them, so we have pivots in every column; therefore the left-hand matrix is nonsingular and is guaranteed to have an inverse.
We can find that inverse by doing backward elimination to eliminate the entries above the diagonal in the left-hand matrix, and then dividing by the pivots. Note that since backward elimination starts with all zero entries below the diagonal in the right-hand matrix, it will not produce any nonzero entries below the diagonal in that matrix. Also, the diagonal entries in the right-hand matrix are not affected by backward elimination, for the same reason. After backward elimination completes the diagonal entries in the right-hand matrix will still be ones, and any nonzero entries produced will be above the diagonal. Dividing by the pivots in the left-hand matrix will then produce nonzero entries in the diagonal of the right-hand matrix.
The final right-hand matrix after completion of Gauss-Jordan elimination will therefore be an upper triangular matrix with nonzero diagonal entries. We thus see that if is an upper-triangular matrix with nonzero diagonal then it is invertible and its inverse  is also an upper-triangular matrix with nonzero diagonal.
is also an upper-triangular matrix with nonzero diagonal.
NOTE: This continues a series of posts containing worked out exercises from the (out of print) book Linear Algebra and Its Applications, Third Edition by Gilbert Strang.
by Gilbert Strang.
If you find these posts useful I encourage you to also check out the more current Linear Algebra and Its Applications, Fourth Edition , Dr Strang’s introductory textbook Introduction to Linear Algebra, Fourth Edition
, Dr Strang’s introductory textbook Introduction to Linear Algebra, Fourth Edition and the accompanying free online course, and Dr Strang’s other books
and the accompanying free online course, and Dr Strang’s other books .
.















 would make the product
would make the product  have 1 times column 1 of A plus 2 times column 3?
have 1 times column 1 of A plus 2 times column 3?



 and
and  position will also produce zeros in the
position will also produce zeros in the  and
and  positions, so that there is no possible pivot in column 3.
positions, so that there is no possible pivot in column 3.
 . Since
. Since  to determine that 5 times row 2 was subtracted from row 3 in elimination.
to determine that 5 times row 2 was subtracted from row 3 in elimination. we know that
we know that  so
so  where
where  we see that the pivots (i.e., the diagonal entries of D) are all 1.
we see that the pivots (i.e., the diagonal entries of D) are all 1. defines a plane in 3-space. Find equations that define the following:
defines a plane in 3-space. Find equations that define the following: and
and 

 . The equation
. The equation  satisfies this condition, and produces a plane parallel to the original plane.
satisfies this condition, and produces a plane parallel to the original plane. . Therefore if we take the equation for the original plane and change the term involving
. Therefore if we take the equation for the original plane and change the term involving  we can produce a new and different equation corresponding to a new plane containing these points. One such equation is
we can produce a new and different equation corresponding to a new plane containing these points. One such equation is  .
. and
and  . One such equation is
. One such equation is  . Since the point
. Since the point  and
and 

 .
.


 . Then for
. Then for 

 for any matrix
for any matrix 


 entry of each matrix appears to be
entry of each matrix appears to be  in general, but the
in general, but the  entry is more complicated. The expression
entry is more complicated. The expression  looks as if it might work; for
looks as if it might work; for  and for
and for  .
.



 we have
we have


 also have an inverse? If so, what is it?
also have an inverse? If so, what is it? ?
? .
. and therefore
and therefore  . But
. But  so we have
so we have  and
and  is a left inverse for
is a left inverse for  and therefore
and therefore  . But
. But  so we have
so we have  and
and  .
. . If
. If  . Since
. Since  we see that
we see that 


 and the columns of
and the columns of  .
. to produce
to produce 
 for all matrices P in the group?
for all matrices P in the group? .
. choices for where to put the 1 entry in row 2,
choices for where to put the 1 entry in row 2,  choices for where to put the 1 entry in row 3, and so on until we have only 1 choice for where to put the 1 entry in row
choices for where to put the 1 entry in row 3, and so on until we have only 1 choice for where to put the 1 entry in row  .
. or six 3 by 3 permutation matrices, of which one is the identity matrix
or six 3 by 3 permutation matrices, of which one is the identity matrix  for which
for which  for any
for any  .
. . We then also have
. We then also have  and in general
and in general  . We then have
. We then have  , and in general
, and in general  is the smallest
is the smallest  .
. and
and 


 . Substituting
. Substituting  and
and  . The solution is therefore
. The solution is therefore

