Exercise 1.7.10. When partial pivoting is used show that  for all multipliers
for all multipliers  in
in  . In addition, show that if
. In addition, show that if  for all
for all  and
and  then after producing zeros in the first column we have
then after producing zeros in the first column we have  , and in general we have
, and in general we have  after producing zeros in column
after producing zeros in column  . Finally, show an 3 by 3 matrix with and for which the last pivot is 4.
. Finally, show an 3 by 3 matrix with and for which the last pivot is 4.
Answer: (a) With partial pivoting we choose the pivot  for each row and column in turn so that the pivot is the largest (in absolute value) of all the candidate pivots in the same column. Thus
for each row and column in turn so that the pivot is the largest (in absolute value) of all the candidate pivots in the same column. Thus  where
where  are all the other candidate pivots. The multipliers are then equal to the candidate pivots divided by the chosen pivot, so that
are all the other candidate pivots. The multipliers are then equal to the candidate pivots divided by the chosen pivot, so that  . But since we have
. But since we have  .
.
(b) Assume that  for all and . Without loss of generality assume that
for all and . Without loss of generality assume that  for all
for all  . (If this were not true then we could simply employ partial pivoting and do a row exchange to ensure that this would be the case.) Also assume that
. (If this were not true then we could simply employ partial pivoting and do a row exchange to ensure that this would be the case.) Also assume that  (i.e., the matrix is not singular). We then have
(i.e., the matrix is not singular). We then have  for and thus
for and thus  for .
for .
Let  be the matrix produced after the first stage of elimination. Then for
be the matrix produced after the first stage of elimination. Then for  we have
we have  and thus
and thus  and thus
and thus  . For we have
. For we have  so that
so that  for . But we have for all (and thus
for . But we have for all (and thus  ) and
) and  for . Thus for the product
for . Thus for the product  we have
we have  for and for the difference
for and for the difference  we have
we have  for (with the maximum difference occurring when
for (with the maximum difference occurring when  and
and  or vice versa).
or vice versa).
So we have for and we also have  for . For the matrix after the first stage of elimination we therefore have
for . For the matrix after the first stage of elimination we therefore have  for all and .
for all and .
Assume that after stage of elimination we have produced the matrix  with
with  for all and and consider stage
for all and and consider stage  of elimination. In this stage our goal is to find an appropriate pivot for column and produce zeros in column for all rows below . Without loss of generality assume that
of elimination. In this stage our goal is to find an appropriate pivot for column and produce zeros in column for all rows below . Without loss of generality assume that  for all
for all  (otherwise we can do a row exchange as noted above). Also assume that
(otherwise we can do a row exchange as noted above). Also assume that  (i.e., the matrix is not singular). We then have
(i.e., the matrix is not singular). We then have  for and thus
for and thus  for .
for .
Let  be the matrix produced after stage of elimination. Then for
be the matrix produced after stage of elimination. Then for  we have
we have  and thus
and thus  and thus
and thus  . For we have
. For we have  so that
so that  for . But we have for all (and thus
for . But we have for all (and thus  ) and
) and  for . Thus for the product
for . Thus for the product  we have
we have  for and for the difference
for and for the difference  we have
we have  for (with the maximum difference occurring when
for (with the maximum difference occurring when  and
and  or vice versa).
or vice versa).
So we have  for and we also have
for and we also have  for . For the matrix after stage of elimination (which produces zeros in column ) we therefore have
for . For the matrix after stage of elimination (which produces zeros in column ) we therefore have  for all and . For
for all and . For  we also have
we also have  for all and after the first stage of elimination (which produces zeros in column 1). Therefore by induction if in the original matrix
for all and after the first stage of elimination (which produces zeros in column 1). Therefore by induction if in the original matrix  we have then for all
we have then for all  if we do elimination with partial pivoting then after stage of elimination (which produces zeros in column ) we will have a matrix for which
if we do elimination with partial pivoting then after stage of elimination (which produces zeros in column ) we will have a matrix for which  .
.
(c) One way to construct the requested matrix is to start with the desired end result and work backward to find a matrix for which elimination will produce that result, assuming that the absolute value of the multiplier at each step is 1 (the largest absolute value allowed under our assumption) and that after stage we have no value larger in absolute value than  .
.
Thus in the final matrix (after stage 2 of elimination) we assume we have a pivot of 4 in column 3 but as yet unknown values for the other entries. The successive matrices at the various stages of elimination (the original matrix and the matrices after stage 1 and stage 2) would then be as follows:

We assume a multiplier of  for the single elimination step in stage 2, and prior to that step (i.e., after stage 1 of elimination) we can have no entry larger in absolute value than 2. The successive matrices at the various stages of elimination would then be as follows:
for the single elimination step in stage 2, and prior to that step (i.e., after stage 1 of elimination) we can have no entry larger in absolute value than 2. The successive matrices at the various stages of elimination would then be as follows:

so that subtracting row 2 from row 3 in stage 2 (i.e., using the multiplier ) would produce the value 4 in the pivot position.
We now need to figure out how to produce a value of 2 in the  position and a value of -2 in the
position and a value of -2 in the  position after stage 1 of elimination. Stage 1 consists of two elimination steps, and we assume a multiplier of 1 or -1 for each step; also, all entries in the original matrix can have an absolute value no greater than 1. The original matrix prior to stage 1 of elimination can then be as follows:
position after stage 1 of elimination. Stage 1 consists of two elimination steps, and we assume a multiplier of 1 or -1 for each step; also, all entries in the original matrix can have an absolute value no greater than 1. The original matrix prior to stage 1 of elimination can then be as follows:

with the multiplier  and the multiplier
and the multiplier  (i.e., in stage 1 of elimination we are adding row 1 to row 2 and subtracting row 1 from row 3).
(i.e., in stage 1 of elimination we are adding row 1 to row 2 and subtracting row 1 from row 3).
Now that we have picked entries for column 3 in the original matrix and suitable multipliers for all elimination steps, we need to pick entries for column 1 and column 2 of the original matrix that are consistent with the chosen multipliers and ensure that elimination will produce nonzero pivots in columns 1 and 2.
We first pick values for the  and entries in the matrix after stage 1 of elimination; since we are using the multiplier those entries should be the same in order to produce a zero in the position after stage 2. We’ll try picking a value of 1 for both entries:
and entries in the matrix after stage 1 of elimination; since we are using the multiplier those entries should be the same in order to produce a zero in the position after stage 2. We’ll try picking a value of 1 for both entries:

From above we know that in stage 1 of elimination row 1 is added to row 2 (i.e., the multiplier ) and row 1 is subtracted from row 3 (i.e., the multiplier ). Since we have to end up with the same value in the and  positions in either case, the easiest approach is to assume that the
positions in either case, the easiest approach is to assume that the  position in the original matrix has a zero entry, so that adding or subtracting it doesn’t change the preexisting entries for rows 2 and 3:
position in the original matrix has a zero entry, so that adding or subtracting it doesn’t change the preexisting entries for rows 2 and 3:

Finally, we need entries in the first column such that adding row 1 to row 2 and subtracting row 1 from row 3 will produce zero:

This completes our task. We now have a matrix

for which and , and for which elimination produces a final pivot of 4.
NOTE: This continues a series of posts containing worked out exercises from the (out of print) book Linear Algebra and Its Applications, Third Edition by Gilbert Strang.
by Gilbert Strang.
If you find these posts useful I encourage you to also check out the more current Linear Algebra and Its Applications, Fourth Edition , Dr Strang’s introductory textbook Introduction to Linear Algebra, Fourth Edition
, Dr Strang’s introductory textbook Introduction to Linear Algebra, Fourth Edition and the accompanying free online course, and Dr Strang’s other books
and the accompanying free online course, and Dr Strang’s other books .
.









 , which is zero for all these matrices.
, which is zero for all these matrices.


















 possible matrices of this type. At present I don’t know of a good method to determine whether the majority of those matrices are invertible or not. I’ll update this post later if and when I have time to work on this some more.
possible matrices of this type. At present I don’t know of a good method to determine whether the majority of those matrices are invertible or not. I’ll update this post later if and when I have time to work on this some more. or
or  .
.


 ).
).




 ).
).


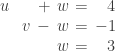
 into the second equation to obtain
into the second equation to obtain
 into the first equation to obtain
into the first equation to obtain




 , and back-substituting the value of
, and back-substituting the value of  . Finally, back-substituting the value of
. Finally, back-substituting the value of  . The solution is therefore
. The solution is therefore


 and (a)
and (a)  , (b)
, (b)  , and (c)
, and (c)  .
.
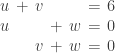
 , we have
, we have  . Then
. Then  or
or  . Substituting for
. Substituting for  we then have
we then have  or
or  . So we can freely choose
. So we can freely choose  and then that value determines the values of
and then that value determines the values of  and
and  then
then


 then
then
 then
then
 .
.

 we have
we have  . We choose
. We choose  . Since
. Since  we have
we have  . Finally, since
. Finally, since  we have
we have  or
or  . We choose
. We choose  .
.

 in this case so that we also have
in this case so that we also have  , and
, and  .
. then
then

 then since
then since  we have
we have  . Since
. Since  we again have
we again have  (and also
(and also 


 we have
we have  or
or  . Since
. Since  we have
we have  . Thus we can choose any value for
. Thus we can choose any value for  and
and  . We then have
. We then have

 and
and  . We then have
. We then have

 and
and  . We then have
. We then have

 as follows
as follows
 and
and  , the inverses
, the inverses  ,
,  , and
, and  .
.




 and
and  .
. of the above matrices.
of the above matrices.




 and
and  . This follows from equation 1M(i) in section 1.6:
. This follows from equation 1M(i) in section 1.6:  .)
.)
 (1/.001) to multiply the first row and subtract it from the second:
(1/.001) to multiply the first row and subtract it from the second:

 (.001/1) to multiply the first row and subtract it from the second:
(.001/1) to multiply the first row and subtract it from the second:

