
Exercise 1.7.8. Take the 10 by 10 Hilbert matrix 




Answer: We can use the open source statistics software R for this exercise. The following R commands will define a 10 by 10 Hilbert matrix. The first command defines 
> A <- array(0, dim=c(10,10))
> for (i in 1:10) {for (j in 1:10) {A[i, j] <- 1/(i+j-1)}}
>
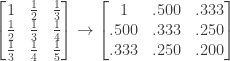
We then print the matrix to double-check that it appears to be correct (we use the option() function to limit the number of digits printed per entry and increase the width of the printable area, so that the entire matrix can be displayed more compactly):
> options(digits=3) > options(width=90) > A [,1] [,2] [,3] [,4] [,5] [,6] [,7] [,8] [,9] [,10] [1,] 1.000 0.500 0.3333 0.2500 0.2000 0.1667 0.1429 0.1250 0.1111 0.1000 [2,] 0.500 0.333 0.2500 0.2000 0.1667 0.1429 0.1250 0.1111 0.1000 0.0909 [3,] 0.333 0.250 0.2000 0.1667 0.1429 0.1250 0.1111 0.1000 0.0909 0.0833 [4,] 0.250 0.200 0.1667 0.1429 0.1250 0.1111 0.1000 0.0909 0.0833 0.0769 [5,] 0.200 0.167 0.1429 0.1250 0.1111 0.1000 0.0909 0.0833 0.0769 0.0714 [6,] 0.167 0.143 0.1250 0.1111 0.1000 0.0909 0.0833 0.0769 0.0714 0.0667 [7,] 0.143 0.125 0.1111 0.1000 0.0909 0.0833 0.0769 0.0714 0.0667 0.0625 [8,] 0.125 0.111 0.1000 0.0909 0.0833 0.0769 0.0714 0.0667 0.0625 0.0588 [9,] 0.111 0.100 0.0909 0.0833 0.0769 0.0714 0.0667 0.0625 0.0588 0.0556 [10,] 0.100 0.091 0.0833 0.0769 0.0714 0.0667 0.0625 0.0588 0.0556 0.0526 >
We next define 
> b <- array(0, dim=c(10)) > b[1] <- 1 > b [1] 1 0 0 0 0 0 0 0 0 0 >
We can now use the R solve() function to solve for
> x <- solve(A, b) > x [1] 100 -4950 79195 -600553 2522294 -6305679 9608580 -8750614 4375282 [10] -923666 >
We then multiply 
> A %*% x
[,1]
[1,] 1.00e+00
[2,] -1.89e-10
[3,] -2.04e-10
[4,] -1.60e-10
[5,] -1.02e-10
[6,] 3.64e-11
[7,] 2.18e-11
[8,] 7.28e-11
[9,] 0.00e+00
[10,] 0.00e+00
>
Finally we tweak
> b2 <- b > b2[10] <- .01 > b2 [1] 1.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.01 > x2 <- solve(A, b2) > x2 [1] -9.14e+03 8.26e+05 -1.82e+07 1.70e+08 -8.30e+08 2.32e+09 -3.87e+09 3.80e+09 [9] -2.02e+09 4.48e+08 >
Note that the very minor change to
NOTE: This continues a series of posts containing worked out exercises from the (out of print) book Linear Algebra and Its Applications, Third Edition by Gilbert Strang.
If you find these posts useful I encourage you to also check out the more current Linear Algebra and Its Applications, Fourth Edition, Dr Strang’s introductory textbook Introduction to Linear Algebra, Fourth Edition
and the accompanying free online course, and Dr Strang’s other books
.
 and
and  are solutions to
are solutions to 

 and subtract it from the second row, and then multiply the first row times
and subtract it from the second row, and then multiply the first row times  and subtract it from the third row:
and subtract it from the third row:











 and
and  (instead of
(instead of  and
and 
 this equation would become
this equation would become
![\rightarrow -u_2 + 2u_1 = h^2 f(jh) + 1 = h^2 [f(jh) + \frac{1}{h^2}]](https://s0.wp.com/latex.php?latex=%5Crightarrow+-u_2+%2B+2u_1+%3D+h%5E2+f%28jh%29+%2B+1+%3D+h%5E2+%5Bf%28jh%29+%2B+%5Cfrac%7B1%7D%7Bh%5E2%7D%5D&bg=ffffff&fg=333333&s=0&c=20201002)
 the corresponding 5 by 5 finite-difference matrix is then
the corresponding 5 by 5 finite-difference matrix is then
 the corresponding difference equation is
the corresponding difference equation is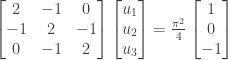
 . Solve the above equation for
. Solve the above equation for  and compare their values to the true solution
and compare their values to the true solution  at
at  ,
,  and
and  .
.
 we have
we have
 we have
we have
 :
:
 we have
we have



 by
by  (and hence
(and hence  ) and the boundary condition
) and the boundary condition  by
by  (and hence
(and hence  ).
). yields zero. Similarly, show that for any solution
yields zero. Similarly, show that for any solution  to the original differential equation,
to the original differential equation,  is also a solution.
is also a solution. in finite difference terms as
in finite difference terms as![- [u_{j-1} - 2u_j + u_j+1]/h^2 = f(jh)](https://s0.wp.com/latex.php?latex=-+%5Bu_%7Bj-1%7D+-+2u_j+%2B+u_j%2B1%5D%2Fh%5E2+%3D+f%28jh%29&bg=ffffff&fg=333333&s=0&c=20201002)

 . The above equation can then be rewritten as
. The above equation can then be rewritten as
 is the approximation of
is the approximation of  .
.
 the above equation becomes
the above equation becomes
 ,
,  , and
, and  . Since
. Since 

 . Then we have
. Then we have![-\frac{d^2v}{dx^2} = -\frac{d^2}{dx^2} [u(x) + 1] = -\frac{d^2}{dx^2}u(x) - \frac{d^2}{dx^2}(1)](https://s0.wp.com/latex.php?latex=-%5Cfrac%7Bd%5E2v%7D%7Bdx%5E2%7D+%3D+-%5Cfrac%7Bd%5E2%7D%7Bdx%5E2%7D+%5Bu%28x%29+%2B+1%5D+%3D+-%5Cfrac%7Bd%5E2%7D%7Bdx%5E2%7Du%28x%29+-+%5Cfrac%7Bd%5E2%7D%7Bdx%5E2%7D%281%29&bg=ffffff&fg=333333&s=0&c=20201002)

![\frac{dv}{dx}(0) = \frac{d}{dx}[u(0) + 1] = \frac{d}{dx}u(o) + \frac{d}{dx}(1) = \frac{du}{dx}(o) + 0 = \frac{du}{dx}(o) = 0](https://s0.wp.com/latex.php?latex=%5Cfrac%7Bdv%7D%7Bdx%7D%280%29+%3D+%5Cfrac%7Bd%7D%7Bdx%7D%5Bu%280%29+%2B+1%5D+%3D+%5Cfrac%7Bd%7D%7Bdx%7Du%28o%29+%2B+%5Cfrac%7Bd%7D%7Bdx%7D%281%29+%3D+%5Cfrac%7Bdu%7D%7Bdx%7D%28o%29+%2B+0+%3D+%5Cfrac%7Bdu%7D%7Bdx%7D%28o%29+%3D+0&bg=ffffff&fg=333333&s=0&c=20201002)
![\frac{dv}{dx}(1) = \frac{d}{dx}[u(1) + 1] = \frac{d}{dx}u(1) + \frac{d}{dx}(1) = \frac{du}{dx}(1) + 0 = \frac{du}{dx}(1) = 0](https://s0.wp.com/latex.php?latex=%5Cfrac%7Bdv%7D%7Bdx%7D%281%29+%3D+%5Cfrac%7Bd%7D%7Bdx%7D%5Bu%281%29+%2B+1%5D+%3D+%5Cfrac%7Bd%7D%7Bdx%7Du%281%29+%2B+%5Cfrac%7Bd%7D%7Bdx%7D%281%29+%3D+%5Cfrac%7Bdu%7D%7Bdx%7D%281%29+%2B+0+%3D+%5Cfrac%7Bdu%7D%7Bdx%7D%281%29+%3D+0&bg=ffffff&fg=333333&s=0&c=20201002)

![-\frac{d^2u}{dx^2} + u \approx - [u(x-h) - 2u(x) + u(x+h)]/h^2 + u(x)](https://s0.wp.com/latex.php?latex=-%5Cfrac%7Bd%5E2u%7D%7Bdx%5E2%7D+%2B+u+%5Capprox+-+%5Bu%28x-h%29+-+2u%28x%29+%2B+u%28x%2Bh%29%5D%2Fh%5E2+%2B+u%28x%29&bg=ffffff&fg=333333&s=0&c=20201002)
![-[u_{j-1} - 2u_j + u_{j+1} + u_j]/h^2 + u_j = jh](https://s0.wp.com/latex.php?latex=-%5Bu_%7Bj-1%7D+-+2u_j+%2B+u_%7Bj%2B1%7D+%2B+u_j%5D%2Fh%5E2+%2B+u_j+%3D+jh&bg=ffffff&fg=333333&s=0&c=20201002)


 . The above equation can then be rewritten as
. The above equation can then be rewritten as


 so that we have
so that we have  . For
. For 






 instead of
instead of  .)
.) and subtract it from the second row:
and subtract it from the second row:
 and subtract it from the third row:
and subtract it from the third row:
 and subtract it from the fourth row:
and subtract it from the fourth row:
 and subtract it from the fifth row:
and subtract it from the fifth row:

 are square matrices, and that
are square matrices, and that  is invertible. Show that
is invertible. Show that  is invertible as well. (Use the fact that
is invertible as well. (Use the fact that  .)
.) and
and  exist and have the same number of rows and columns. We then have
exist and have the same number of rows and columns. We then have



![\rightarrow [A(I - BA)^{-1} B + I] (I - AB) = AB - AB + I = I](https://s0.wp.com/latex.php?latex=%5Crightarrow+%5BA%28I+-+BA%29%5E%7B-1%7D+B+%2B+I%5D+%28I+-+AB%29+%3D+AB+-+AB+%2B+I+%3D+I&bg=ffffff&fg=333333&s=0&c=20201002)
 is a left inverse for
is a left inverse for ![(I - AB)[A(I - BA)^{-1} B + I]](https://s0.wp.com/latex.php?latex=%28I+-+AB%29%5BA%28I+-+BA%29%5E%7B-1%7D+B+%2B+I%5D&bg=ffffff&fg=333333&s=0&c=20201002)




 and subtracting it from the second row, multiplying the first row by the multiplier
and subtracting it from the second row, multiplying the first row by the multiplier 




