In the previous post I discussed multiplying block diagonal matrices as part of my series on defining block diagonal matrices and partitioning arbitrary square matrices uniquely and maximally into block diagonal form (part 1, part 2, part 3, part 4, and part 5). In this final post in the series I discuss the inverse of a block diagonal matrix. In particular I want to prove the following claim:
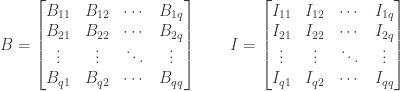
If  is a block diagonal matrix with
is a block diagonal matrix with  submatrices on the diagonal then is invertible if and only if
submatrices on the diagonal then is invertible if and only if  is invertible for
is invertible for  . In this case
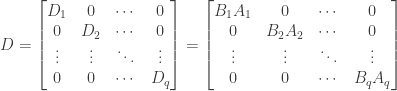
. In this case  is also a block diagonal matrix, identically partitioned to , with
is also a block diagonal matrix, identically partitioned to , with  so that
so that

Proof: This is an if and only if
statement, so I have to prove two separate things:
- If is invertible then is a block diagonal matrix that has the form described above.
- If there is a block diagonal matrix as described above then it is the inverse of .
a) Let be an  by square matrix partitioned into block diagonal form with row and column partitions:
by square matrix partitioned into block diagonal form with row and column partitions:

and assume that is invertible. Then a unique by square matrix  exists such that
exists such that  .
.
We partition both and  into block matrices in a manner identical to that of . In our framework
into block matrices in a manner identical to that of . In our framework identically partitioned
means that the partitions of can be described by a partition vector  of length
of length  , with containing
, with containing  rows and columns. We can then take that partition vector and use it to partition and in an identical manner. (This works because and are also by square matrices.)
rows and columns. We can then take that partition vector and use it to partition and in an identical manner. (This works because and are also by square matrices.)
We then have
Since  , from the previous post on multiplying block matrices we have
, from the previous post on multiplying block matrices we have

We can rewrite the above sum as follows:

For both sums we have  for all terms in the sums, and since is in block diagonal form we have
for all terms in the sums, and since is in block diagonal form we have  for all terms in the sums, so that
for all terms in the sums, so that

But is the identity matrix, with 1 on the diagonal and zero for all other entries. If  then the submatrix
then the submatrix  will contain all off-diagonal entries, so that
will contain all off-diagonal entries, so that  , and therefore
, and therefore  for . But is an arbitrary matrix and thus
for . But is an arbitrary matrix and thus  may be nonzero. For the product of and
may be nonzero. For the product of and  to always be zero when , we must have
to always be zero when , we must have  when . Thus is in block diagonal form when partitioned identically to .
when . Thus is in block diagonal form when partitioned identically to .
When  we have
we have  . But
. But  has 1 for all diagonal entries and 0 for all off-diagonal entries; it is simply a version of the identity matrix with rows and columns. Since the product
has 1 for all diagonal entries and 0 for all off-diagonal entries; it is simply a version of the identity matrix with rows and columns. Since the product  is equal to the identity matrix,
is equal to the identity matrix,  is a right inverse of .
is a right inverse of .
We also have  , so that
, so that

We can rewrite the above sum as follows:

For both sums we have  for all terms in the sums, and since is in block diagonal form we have
for all terms in the sums, and since is in block diagonal form we have  for all terms in the sums, so that
for all terms in the sums, so that  . For both sides of the equation are zero (since both and are in block diagonal form), and for we have
. For both sides of the equation are zero (since both and are in block diagonal form), and for we have  . But
. But  is the identity matrix, and thus
is the identity matrix, and thus  is a left inverse of
is a left inverse of  for
for  .
.
Since is both a right and left inverse of for , we conclude that is invertible for and has inverse  . We also know that
. We also know that  is partitioned into block diagonal form, so we conclude that
is partitioned into block diagonal form, so we conclude that

b) Let be an by square matrix partitioned into block diagonal form with row and column partitions:
and assume that is invertible for . Then for a unique  by square matrix
by square matrix  exists such that
exists such that  .
.
We now construct block diagonal matrix with the matrices as its diagonal submatrices:

Since each  is a square matrix with the same number of rows and columns as the corresponding submatrix of , the matrix will also be a square matrix of size by , and as a block diagonal matrix is partitioned identically to .
is a square matrix with the same number of rows and columns as the corresponding submatrix of , the matrix will also be a square matrix of size by , and as a block diagonal matrix is partitioned identically to .
Now form the product matrix  , which is also an by matrix. Since and are identically partitioned block diagonal matrices, per the previous post on multiplying block diagonal matrices we know that
, which is also an by matrix. Since and are identically partitioned block diagonal matrices, per the previous post on multiplying block diagonal matrices we know that  is also a block diagonal matrix, identically partitioned to and , with each
is also a block diagonal matrix, identically partitioned to and , with each  :
:

But we have  , , and therefore
, , and therefore  , . Since every submatrix
, . Since every submatrix  has 1 on the diagonal and zero otherwise, the matrix itself has 1 on the diagonal and zero otherwise, so that
has 1 on the diagonal and zero otherwise, the matrix itself has 1 on the diagonal and zero otherwise, so that  . The matrix is therefore a
. The matrix is therefore a left right inverse for .
Next form the product matrix  , which is also an by block diagonal matrix, identically partitioned to and , with each
, which is also an by block diagonal matrix, identically partitioned to and , with each  :
:
But we have  , , and therefore
, , and therefore  , . Since every submatrix
, . Since every submatrix  has 1 on the diagonal and zero otherwise, the matrix
has 1 on the diagonal and zero otherwise, the matrix  itself has 1 on the diagonal and zero otherwise, so that
itself has 1 on the diagonal and zero otherwise, so that  . The matrix is therefore a
. The matrix is therefore a right left inverse for .
Since is both a left and a right inverse for , is therefore the inverse of . From the way was constructed we then have

Combining the results of (a) and (b) above, we conclude that if is a block diagonal matrix with submatrices on the diagonal then is invertible if and only if is invertible for . In this case is also a block diagonal matrix, identically partitioned to , with .
UPDATE: Corrected two instances where I referred to the matrix as a left inverse of instead of a right inverse, and vice versa.
 Buy me a snack to sponsor more posts like this!
Buy me a snack to sponsor more posts like this!






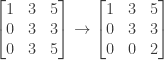






 , and determine whether
, and determine whether  we have the following system of three equations:
we have the following system of three equations:
![[a_{31} - (a_{11}+a_{21})]u + [a_{32} - (a_{12}+a_{22})]v + [a_{33} - (a_{13}+a_{23})]w = 4 - (1+2)](https://s0.wp.com/latex.php?latex=%5Ba_%7B31%7D+-+%28a_%7B11%7D%2Ba_%7B21%7D%29%5Du+%2B+%5Ba_%7B32%7D+-+%28a_%7B12%7D%2Ba_%7B22%7D%29%5Dv+%2B+%5Ba_%7B33%7D+-+%28a_%7B13%7D%2Ba_%7B23%7D%29%5Dw+%3D+4+-+%281%2B2%29&bg=ffffff&fg=333333&s=0&c=20201002)


 must be nonzero; otherwise there will be no pivot in the last row and elimination will fail.
must be nonzero; otherwise there will be no pivot in the last row and elimination will fail.
 ; recall that we know from above that
; recall that we know from above that  by
by 
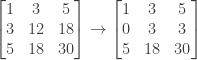
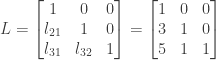
 and subtract the result from the third row, obtaining the following matrix:
and subtract the result from the third row, obtaining the following matrix:
 must also be nonzero, for the same reason that
must also be nonzero, for the same reason that  by
by  , and then subtract the result from the third row. This elimination step produces the following matrix:
, and then subtract the result from the third row. This elimination step produces the following matrix:
 must also be nonzero, or else its row will not have a pivot.
must also be nonzero, or else its row will not have a pivot. ,
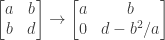
, 
 , and since the inverse of the 1 by 1 matrix is simply the reciprocal of its (sole) entry, the second submatrix is invertible only if
, and since the inverse of the 1 by 1 matrix is simply the reciprocal of its (sole) entry, the second submatrix is invertible only if  . Combining these results, we must have
. Combining these results, we must have 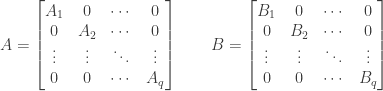

 .
.

 contains
contains  columns, and
columns, and  contains
contains  columns,
columns,  contains
contains 


 if
if  or in our shorthand notation
or in our shorthand notation 
 and
and  so that this reduces to
so that this reduces to  .
.
 and
and  so that
so that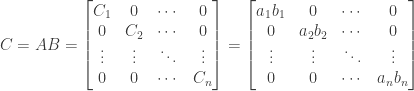
 for an
for an  partitions, where
partitions, where  , and if we partition
, and if we partition  partitions using a vector
partitions using a vector  then we have
then we have  .
.
 where
where  we have
we have  for some
for some  where
where  . In other words, any partition boundary specified by
. In other words, any partition boundary specified by  for some
for some  . This follows from the fact that
. This follows from the fact that  ; then we have
; then we have  and thus
and thus  , which in turn implies that
, which in turn implies that  . (The proof of this last statement is by contradiction: If we instead had
. (The proof of this last statement is by contradiction: If we instead had  then because
then because  .) Similarly
.) Similarly  implies that
implies that  . So each entry
. So each entry  of
of  of
of  entries in
entries in  in
in  . The vector
. The vector 
 , where
, where  , there exists a
, there exists a  such that
such that  . (The proof is this is by contradiction: Suppose for
. (The proof is this is by contradiction: Suppose for  for some
for some  , then
, then  ; then we have
; then we have  and thus
and thus  , which in turn implies that
, which in turn implies that  .) So each entry
.) So each entry  of
of  of
of  for
for  ). We already have
). We already have  by the definition of a partition vector. Now suppose
by the definition of a partition vector. Now suppose  and
and (assuming they exist, that is where
(assuming they exist, that is where  ).
). for some
for some  . Then we would have
. Then we would have  and thus
and thus  . But this cannot be, since
. But this cannot be, since  . So we must have
. So we must have  . We also know that
. We also know that  for some
for some  . By a similar argument we must also have
. By a similar argument we must also have  .
. , and since
, and since  . But we also have
. But we also have  . Since we have both
. Since we have both  we must have
we must have  . This in turn implies that
. This in turn implies that  and thus
and thus  .
. we have
we have  . By induction we have
. By induction we have  where
where 

 for
for 
 by definition. The claim therefore holds true for
by definition. The claim therefore holds true for  (with
(with  in this case). Suppose that for some
in this case). Suppose that for some  . We want to show that
. We want to show that  for some
for some  such that
such that  . This is done as follows: We have
. This is done as follows: We have  so we know that
so we know that  for at least one
for at least one  (i.e.,
(i.e.,  ). We select
). We select  we then conclude that
we then conclude that  . (If we had
. (If we had  then
then  . We then have
. We then have  . Finally,
. Finally,  implies that
implies that  and thus
and thus  . The result is that
. The result is that  . I now claim that
. I now claim that  . The submatrix
. The submatrix  includes entries from rows
includes entries from rows  through
through  if
if  and
and  , and the requirement that all submatrices below
, and the requirement that all submatrices below  and
and  .
. , which means that we also have
, which means that we also have  and
and  .
. was chosen to be the smallest
was chosen to be the smallest  and
and  , or if
, or if  and
and  ; alternatively
; alternatively  , which contradicts our assumption that
, which contradicts our assumption that  . In the latter case our assumption that
. In the latter case our assumption that  , which contradicts our assumption about how
, which contradicts our assumption about how  and
and  we have
we have  (as previously discussed) and
(as previously discussed) and  , i.e.,
, i.e.,  where
where  (i.e., we are in the upper right part of the matrix, and the submatrix
(i.e., we are in the upper right part of the matrix, and the submatrix 
 (because
(because  . That means that
. That means that  was not assigned on the last step of the process described in the previous post (that step being the
was not assigned on the last step of the process described in the previous post (that step being the  step, and the value assigned being
step, and the value assigned being  ), and that in turn means that
), and that in turn means that  and
and  .
. through
through 
 where
where  of
of  ). As noted above all such entries are zero by the definition of
). As noted above all such entries are zero by the definition of  if
if  (i.e., we are in the lower left part of the matrix, and the submatrix
(i.e., we are in the lower left part of the matrix, and the submatrix  (as assumed) and
(as assumed) and  . That means that
. That means that  was not assigned on the last step of the process described above, and that in turn means that
was not assigned on the last step of the process described above, and that in turn means that  and
and  .
.
 ). As noted above all such entries are zero by the definition of
). As noted above all such entries are zero by the definition of  , using a vector
, using a vector 


 is the first row and column in the
is the first row and column in the  partition,
partition,  is the last row and column in the
is the last row and column in the  is the number of rows and columns in the
is the number of rows and columns in the  submatrices of
submatrices of 
 entry of
entry of  .
. we have
we have  and
and  we have
we have  so that
so that  and
and  . (For a more detailed discussion of why this is so please see the
. (For a more detailed discussion of why this is so please see the  , so that the first submatrix on the diagonal,
, so that the first submatrix on the diagonal,  , will start with row 1 and column 1. Then for
, will start with row 1 and column 1. Then for  , in turn we calculate
, in turn we calculate  by looking for the smallest
by looking for the smallest  such that
such that

 and have completed partitioning the matrix
and have completed partitioning the matrix  .
. , and repeat the process for
, and repeat the process for  and so on until the process terminates.
and so on until the process terminates. . If in computing
. If in computing  , with the resulting vector
, with the resulting vector  and therefore
and therefore  . We then repeat the process with
. We then repeat the process with  to find
to find  and by similar reasoning have
and by similar reasoning have  and thus
and thus  . In general we see that
. In general we see that  .
. (i.e., the
(i.e., the  step in the process). From the previous paragraph we know that
step in the process). From the previous paragraph we know that  . Substituting into the above conditions relating to
. Substituting into the above conditions relating to  we are looking for
we are looking for  where
where

 . Then the first condition above cannot hold, because
. Then the first condition above cannot hold, because  implies that
implies that  , and
, and  implies that
implies that  , and there are no elements
, and there are no elements  . We are thus guaranteed that the process of constructing the vector
. We are thus guaranteed that the process of constructing the vector  is zero as noted, and all the other elements
is zero as noted, and all the other elements  are chosen to be row and column indices of
are chosen to be row and column indices of  for all
for all  . (This follows from the way
. (This follows from the way  .)
.) , and for the number of partitions
, and for the number of partitions  .
.


 .
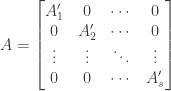
. the 1 by 1 matrix in the lower right. We have thus partitioned
the 1 by 1 matrix in the lower right. We have thus partitioned 

 , and with each diagonal submatrix
, and with each diagonal submatrix  . The partitioning is clearly both maximal and unique, since we cannot have more than
. The partitioning is clearly both maximal and unique, since we cannot have more than 
