Exercise 3.3.13. Using least squares, find the line that is the best fit to the following measurements:
 at
at 
 at
at 
 at
at 
 at
at 
Also, given the matrix

find the projection of  onto the column space
onto the column space  .
.
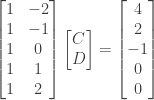
Answer: Assuming that the line in question has the form  the problem can be expressed as that of finding a solution to the system
the problem can be expressed as that of finding a solution to the system
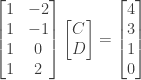
or  where
where  is the exact solution.
is the exact solution.
In this case there is no exact solution, so we look for the least squares solution  that minimizes the error vector
that minimizes the error vector  . The error vector is minimized when it is orthogonal to the column space of
. The error vector is minimized when it is orthogonal to the column space of  and is therefore in the left nullspace of . We then have
and is therefore in the left nullspace of . We then have  so that
so that  is a solution to the system
is a solution to the system  .
.
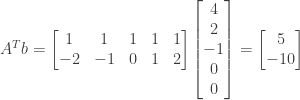
We have

and

so that the system reduces to

or

expressed as a system of equations.
Multiplying the first equation by  and adding it to the second equation produces the system
and adding it to the second equation produces the system
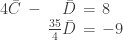
From the second equation we have  . Substituting that value into the first equation we have
. Substituting that value into the first equation we have  or
or  .
.
The line of best fit is therefore  .
.
Given the matrix

the projection matrix  onto the column space of can be computed as
onto the column space of can be computed as

From above we have

so that its inverse is


We then have



The projection of the vector onto the column space of is then


The vector  corresponds to the points on the least squares line of best fit
corresponds to the points on the least squares line of best fit  for the times
for the times  :
:




NOTE: This continues a series of posts containing worked out exercises from the (out of print) book Linear Algebra and Its Applications, Third Edition by Gilbert Strang.
by Gilbert Strang.
If you find these posts useful I encourage you to also check out the more current Linear Algebra and Its Applications, Fourth Edition , Dr Strang’s introductory textbook Introduction to Linear Algebra, Fifth Edition
, Dr Strang’s introductory textbook Introduction to Linear Algebra, Fifth Edition and the accompanying free online course, and Dr Strang’s other books
and the accompanying free online course, and Dr Strang’s other books .
.









 ,
,  , and
, and  , and the two lines
, and the two lines  through the origin and
through the origin and  through
through  and
and  such that the distance
such that the distance  between the points
between the points  and
and  is at a minimum. Write down equations for
is at a minimum. Write down equations for  when
when  ,
,  , and
, and  .
. with respect to
with respect to 
 and
and  we have
we have  (the inner product is the same no matter in which order we calculate it) and
(the inner product is the same no matter in which order we calculate it) and  (the transpose of a difference is the same as the difference of the transposes). We then have
(the transpose of a difference is the same as the difference of the transposes). We then have










 ,
,  ,
,  ,
,  , and
, and  . The system of equations is then
. The system of equations is then

 .
. that projects onto the row space of
that projects onto the row space of  that projects onto the nullspace of
that projects onto the nullspace of  . Recall from exercise 3.3.11 that if
. Recall from exercise 3.3.11 that if  and
and  a projection matrix onto
a projection matrix onto  then we have
then we have  .
. or
or  .
. projects onto the column space of
projects onto the column space of  . We can then find the matrix that projects onto
. We can then find the matrix that projects onto  using the standard formula but substituting
using the standard formula but substituting ![P_R = A^T[(A^T)^TA^T]^{-1}(A^T)^T = A^T(AA^T)^{-1}A](https://s0.wp.com/latex.php?latex=P_R+%3D+A%5ET%5B%28A%5ET%29%5ETA%5ET%5D%5E%7B-1%7D%28A%5ET%29%5ET+%3D+A%5ET%28AA%5ET%29%5E%7B-1%7DA&bg=ffffff&fg=333333&s=0&c=20201002)
 :
:



 .
.
 and then substituting into the third equation we have
and then substituting into the third equation we have  . However we then get differing values of
. However we then get differing values of  depending on whether we substitute into the second equation or the first. The system has no solution
depending on whether we substitute into the second equation or the first. The system has no solution  as written.
as written. . We have
. We have


 onto the line
onto the line  .
. is a basis for the subspace being projected onto, which is thus the column space of
is a basis for the subspace being projected onto, which is thus the column space of
 we have
we have
 and
and

 is a vector with unit length. Show that the matrix
is a vector with unit length. Show that the matrix  (with rank 1) is a projection matrix.
(with rank 1) is a projection matrix.
 so that
so that

 and
and  the rank-1 matrix
the rank-1 matrix  geometrically. Why does
geometrically. Why does  ? (Give both a geometric and algebraic explanation.)
? (Give both a geometric and algebraic explanation.) produces
produces  . This can be thought of combining the following operations:
. This can be thought of combining the following operations: ). Next, scale the resulting vector by a factor of 2 and reverse its direction (
). Next, scale the resulting vector by a factor of 2 and reverse its direction ( ). The resulting vector is still on the line onto which
). The resulting vector is still on the line onto which  ). The final vector
). The final vector  and the original vector
and the original vector 


 this produces the vector
this produces the vector  :
:
 is applied again then it would reflect the vector
is applied again then it would reflect the vector 

 and
and  . Find a nonzero vector
. Find a nonzero vector 


 by solving the system
by solving the system  :
:
 and
and  are basic variables, and
are basic variables, and  is a free variable. Setting
is a free variable. Setting  we have
we have  (from the second row) and
(from the second row) and  (from the first row). The vector
(from the first row). The vector  is therefore a solution to
is therefore a solution to 

